

|
Sub propertiesWe are A group of 20 fourth-year engineering students from Ben Gurion University (BGU) in Israel initiated and established a team which will participate in the international AUVSI & ONR robotics competition. Our goal is to build an autonomous submarine that will meet the future needs of research and underwater services.
As a
first year team, our biggest challenge was starting from scratch. However, with
a lot of hard work and the support of our mentor Prof
Hugo Guterman we managed to design and build the submarine and it's
systems: Mechanical, Electrical and Software.
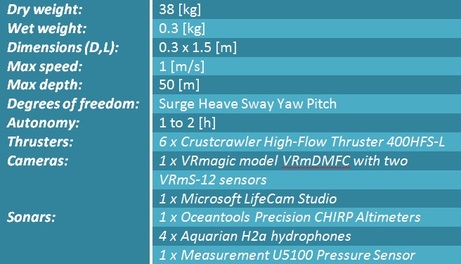
The submarine is divided into three main cells, the two side cells consist of the thrusters, the robotic arm, the torpedoes, the butteries and the cameras (which are isolate). These cells are full of water. The central cell contains the electrical system, the main computer and all the electrical components. The six thrusters give the submarine five degrees of freedom. The submarine is Cylinder shaped. It measures 1.5m in length, 0.3m in diameter and it Weighs 38 kg. It can operate at a maximum velocity of 1m/s. The on-board batteries can sustain the vehicle in operation for about an hour. The electrical system maintains the submarine in power management and motion control. The submarine takes feedback from an on-board Inertial Measurement Unit (IMU) which measures the submarine angles, and from its three cameras that inform the mission planner of the current location. 1. MECHANICAL SYSTEMS
Since the team started this project from scratch, the design and fabrication of the submarine consumed big amounts of time. During the summer of 2012 the team studied the submarine world in order to decide the base lines of the Hydro-Camel design. The shape chosen was a missile-like vehicle that can move in 3 axis using 6 independent motors. The entire sub and its systems were modeled on a CAD software (SolidWorks) and its underwater behavior was tested using a CFD software (SolidWorks Flow Simulation) in order to find the submarine weak spots and improve them before manufacturing. The submarine’s body is made of carbon fibers and was manufactured by the mechanical team at one of the Hydro-Camel sponsor's workshop.
2. ELECTRICAL SYSTEMS
The primary goal of the Integration system is to enable the sub to analyze the environment by an array of different systems that develop sidelong analogies and digital indications integrated parallel, such as power management system, operating system, shutdown system, routine testing system and a system that provides mission control alerts about power management and a prognosis for future failures prevention.
3. softwareThe robot's system was developed using ROS (Robots Operating System)
ROS provide advanced data handling and object serialization, thus allowing a development of a very modular code. Furthermore, using the ROS master server saved time in integrating the drivers for controllers. System design Each mechanical feature is controlled by a specifically designated program that acts as communication node with a master server that manages all the data flow.The actual features of the mission control modules are developed separately and communicate with the comm nodes through the server. |
For more information check our journal paper
| ||||
